


ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ, НАУКИ И МОЛОДЕЖНОЙ ПОЛИТИКИ
ВОРОНЕЖСКОЙ ОБЛАСТИ
государственное образовательное бюджетное учреждение
среднего профессионального образования Воронежской области
«Воронежский авиационный техникум имени В.П. Чкалова»
(ГОБУ СПО ВО «ВАТ имени В.П. Чкалова»)
МЕТОДИЧЕСКИЕ УКАЗАНИЯ И КОНТРОЛЬНЫЕ ЗАДАНИЯ
к выполнению контрольной работы
по учебной дисциплине
УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ
|
Специальность: |
151901 Технология машиностроения |
|
Квалификация: |
техник |
|
Форма обучения: |
заочная |
Воронеж
2013
Одобрено
На заседании цикловой комиссии
«Технологии авиа- и машиностроения»
Решение от « »___________2013
Председатель комиссии
________________Минаков А.Н.
Автор: Мартьянова В.Ю. – преподаватель ВАТ им.В.П.Чкалова
Рецензент: Минаков А.Н. – преподаватель ВАТ им.В.П.Чкалова
Содержание
1 Пояснительная записка 4
2 Общие указания 5
3 Перечень рекомендуемой литературы 6
4 Варианты контрольной работы 7
5 Пример ответов на вопросы контрольной работы 13
1.Пояснительная записка
Цели и задачи контрольной работы: проверить и оценить знания студентов, полученные при самостоятельном изучении курса.
Для выполнения контрольной работы студент должен изучить ниже перечисленные темы курса; знать основные понятия автоматики, знать назначение, структуру, виды систем автоматического управления, их основные качественные характеристики; виды, назначение и принцип действия основных структурных элементов систем автоматического управления. Студент должен изучить способы автоматического контроля, принцип действия датчиков, реле, усилителей, контактных элементов.
Это даст возможность студенту правильно проектировать гибкие производственные системы для изготовления деталей, учитывать возможности автоматизации при составлении техпроцессов, разбираться в причинах отказов оборудования, в наладке станков с числовым программным управлением.
Темы курса, по которым выполняется контрольная работа.
Основные понятия и определения автоматики.
Понятия о системах.
Параметры и характеристики элементов
автоматики.
Структура и классификация систем автоматического управления.
Состав оборудования гибких производственных систем.
Элементная база систем автоматического управления.
Программные системы автоматического регулирования.
Следящие системы автоматического регулирования.
Понятия устойчивости и качества систем автоматического регулирования.
Замкнутые и разомкнутые системы автоматического регулирования.
Основные понятия об автоматизированных системах управления (АСУ).
Системы автоматического контроля, контрольно-измерительные системы (САК, КИС).
Технические средства контроля.
Датчики в системах автоматического управления, параметрические и генераторные датчики.
Реле в системах автоматического управления.
Корректирующие устройства.
Контакты (электрические, магнитоуправляемые, бесконтактные переключатели), путевые выключатели.
Усилители (электрические, гидравлические и пневматические).
Исполнительные механизмы.
Формы представления хода технологического процесса при проектировании систем автоматического управления.
Основные логические функции.
Устройства для реализации логических функций.
Особое внимание при изучении курса следует уделить связи автоматических систем с технологическими процессами изготовления деталей, узлов и машин.
Каждый вариант контрольной работы содержит четыре вопроса из разных разделов курса. Ответы на вопросы должны содержать необходимые схемы структур систем автоматического управления, элементов систем автоматики с соответствующими пояснениями.
2.Общие указания
Студент-заочник должен выполнить одну контрольную работу и предъявить её до начала экзаменационной сессии. Студенты, не выполнившие контрольную работу в срок и не получившие по ней зачета, к зачёту по дисциплине не допускаются.
Номер варианта контрольной работы соответствует номеру студента по журналу. Контрольная работа, выполненная не по своему варианту или выполненная небрежно, не рецензируется и не зачитывается.
Работу следует выполнять чётким разборчивым почерком или на компьютере. Записи следует делать без сокращений. Необходимые схемы, дающее представление о структуре систем, принципе действия элементов систем автоматики обязательно должны быть приведены в работе. Схемы необходимо сопровождать соответствующими пояснениями. Рисунки необходимо выполнять с помощью чертёжных принадлежностей или на компьютере. Содержание задания следует переписывать полностью. Страницы работы должны быть пронумерованы, иметь свободные поля для замечаний преподавателя. Должны быть приведены все необходимые пояснения.
В конце работы необходимо привести список использованной литературы.
К методическим указаниям приложен пример ответа на вопросы контрольной работы.
3.Перечень рекомендуемой литературы.
1.Основная литература.
Б.В.Шандров, А.А.Шапарин, А.Д.Чудаков Автоматизация производства (металлообработка) - ACADEMA, 2009
А.С.Наземцев, Пневматические приводы и средства автоматизации - Москва «Форум», 2008
Конспект лекций по дисциплине Управление техническими системами
2. Дополнительная литература.
О.И. Головинский Основы автоматики - М «Высшая школа», 1987
Е.М. Гордин, Ю.Ш. Митник, В.А.Тарлинский Основы автоматики и вычислительной техники - М «Машиностроение», 1978
А.Ф. Зимодро, Г.Л. Скибинский Основы автоматики - Ленинград Энергоатомиздат 1984
С.Е.Локтева Станки с программным управлением и промышленные роботы - М «Машиностроение» 1986
В.В.Стрыгин Основы автоматики и вычислительной техники - М Машиностроение» 1981
В.Н.Шурков Основы автоматизации производства и промышленные роботы. Учебное пособие для машиностроительных техникумов - М «Машиностроение» 1989.
4. Варианты контрольной работы.
Вариант 1.
1.Определить понятия: автоматика, автоматизация, уровни автоматизации в машиностроении. Привести примеры систем автоматики соответствующие этим уровням. Определить понятия: кибернетика (разделы кибернетики), телемеханика, телеуправление.
2.Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема тензометрических датчиков.
3.Какими датчиками в станках можно измерить линейные перемещения (перечислить)?
Вариант 2.
1.Дать определение видам автоматических систем управления (в соответствии с назначением), применяемых в механообработке.
2.Контактные методы контроля, применяемые в станках с ЧПУ.
3.С помощью каких устройств в гибких автоматических системах и в станках с ЧПУ обеспечивается определённая последовательность действий?
Вариант 3.
1.Способы передачи информации в системах автоматического управления.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема реостатных датчиков.
3. Какими датчиками в станках можно измерить усилия, деформации?
Вариант 4.
1.Дать определение системы. Что определяет структуру системы? Из каких по назначению элементов состоят системы автоматики? Какими основными параметрами характеризуют элементы систем автоматики?
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема потенциометрических датчиков.
3. Какими датчиками в станках можно измерить линейные скорости?
Вариант 5.
1.Что такое статический и динамический режимы работы системы (элемента) автоматики? Какими параметрами и характеристиками определяют статический режим работы системы автоматики (элемента)?
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема терморезисторов.
3. Какими датчиками в станках можно измерить угловые скорости?
Вариант 6.
1. Что такое статический и динамический режимы работы системы (элемента) автоматики? Какими параметрами и характеристиками определяют динамический режим работы системы автоматики (элемента)?
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема полупроводниковых терморезисторов.
3. Какими датчиками в станках можно измерить перемещения?
Вариант 7.
1.Привести обобщенную структурную схему системы автоматического управления. Описать назначение элементов, входящих в состав системы.
2. Назначение, устройство, виды, принцип действия, область применения, схема оптических параметрических датчиков. Из каких элементов состоит оптический датчик?
3. Какими датчиками в станках можно измерить расход жидкости?
Вариант 8.
1.Дать определение системам с числовым программным управлением, следящим и стабилизирующим системам, изобразить структурную схему системы с числовым программным управлением, описать структурные составляющие.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема генераторных оптических датчиков.
3.Контроль каких параметров осуществляют для получения информации о системе СПИД (станок, приспособление, инструмент, деталь) в станках с числовым программным управлением?
Вариант 9.
1.Дать определение замкнутым и разомкнутым системам автоматического управления. Описать их возможности и область применения.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема индуктивных параметрических датчиков.
3.Перечислить бесконтактные методы измерений, применяемые в станках с ЧПУ. Привести примеры применения этих методов.
Вариант 10.
1.Дать определение понятию устойчивости работы элемента (системы) автоматики. Привести параметры и характеристики, определяющие устойчивость и качество работы элемента (системы) автоматики.
2.Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема реостатных датчиков.
3.Привести схемы контактных методов контроля линейных и круговых размеров деталей, отклонения формы детали в станках с ЧПУ. Привести объяснение этих схем.
Вариант 11.
1.Привести пример использования следящих систем в металлорежущих станках. Описать принцип действия системы.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема термометрических датчиков (терморезисторов).
3.Какие бесконтактные методы контроля используют в станках с программным управлением? Каковы их достоинства?
Вариант 12.
1.Какие принципы управления используют в системах автоматики станков с ЧПУ? Каковы их достоинства и недостатки, область применения?
2.Как измеряют износ инструмента в станках с программным управлением?
3. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема термопар.
Вариант 13.
1.Что такое гибкие производственные системы? Какова область их применения? Привести состав оборудования и подразделений гибкого производственного участка.
2.Структура фотодатчиков. Виды источников света, виды приёмников света фотодатчиков. Область применения фотодатчиков.
3.Устройство, принцип действия, область применения в станках систем технического зрения.
Вариант 14.
1.Дать определения активному и пассивному контролю. Какие параметры контролируют в станках с программным управлением? Что является объектами автоматического контроля в гибких производственных системах?
2. Назначение, устройство, принцип действия, область применения, достоинства и недостатки, схема параметрических фотодатчиков.
3.Какие бесконтактные методы контроля применяют в станках с числовым программным управлением?
Вариант 15.
1.Назначение датчиков в системах автоматики. Структура датчиков, основные параметры. Классификация датчиков.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема термометрических датчиков (терморезисторов).
3.Способы измерения сил резания в станках с ЧПУ.
Вариант 16.
1.Привести классификацию электрических датчиков. Основные виды параметрических и генераторных датчиков.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема индуктивных параметрических датчиков.
3.Какими датчиками измеряют скорость резания в металлорежущих станках.
Вариант 17.
1.Исполнительные механизмы систем автоматического управления.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема ёмкостных датчиков.
3.Методы измерения упругих деформаций деталей и узлов металлорежущего станка.
Вариант 18.
1.Гидравлические усилители мощности в станках с ЧПУ.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема трансформаторных датчиков.
3.Методы контроля линейных и угловых размеров в станках с ЧПУ.
Вариант 19.
1.Вспомогательные устройства систем автоматического управления.
2.Индукционные генераторные датчики. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки.
3.Методы контроля шероховатости поверхности деталей в станках с ЧПУ.
Вариант 20.
1.Устройства для обеспечения определённой последовательности действий, включения, выключения и переключения цепей в системах автоматического управления.
2. Назначение, устройство, принцип действия, область применения, достоинства и недостатки, схема термопар.
3.Датчики для контроля присутствия объекта в данном месте в станках с ЧПУ.
Вариант 21.
1.Назначение, классификация и основные параметры реле.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема магнитоуправляемых контактов.
3.Какими датчиками можно измерить перемещения рабочих органов станков, их принцип действия.
Вариант 22.
1.Усилители систем автоматики станков с ЧПУ.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема поляризованных реле.
3.Какими датчиками можно измерить угловые скорости в станках с ЧПУ. Каково их устройство и принцип действия?
Вариант 23.
1.Виды путевых выключателей в системах автоматики. Область их применения, устройство, принцип действия.
2. Назначение, устройство, принцип действия, область применения, достоинства и недостатки, схема пьезоэлектрических датчиков.
3.Какими датчиками измеряют усилия и деформации в станках с ЧПУ?
Вариант 24.
1.Электрические исполнительные механизмы систем автоматического управления.
2. Назначение, устройство, принцип действия, область применения, достоинства и недостатки, схема генераторных фотодатчиков.
3. Как измеряют износ инструмента в станках с программным управлением?
Вариант 25.
1.Электронные усилители систем автоматики.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема электромагнитных реле.
3.Какими пневматическими устройствами реализуют логические функции «да», «и», «или»?
Вариант 26.
1.Основные логические функции систем автоматики. Область их применения.
2. Назначение, устройство, принцип действия, область применения, достоинства и недостатки, схема транзисторных усилителей.
3. Методы контроля шероховатости поверхности деталей в станках с ЧПУ.
Вариант 27.
1.Структура систем автоматики. Состав и назначение устройств систем автоматики.
2. Назначение, устройство, виды, принцип действия, достоинства и недостатки, схема магнитных усилителей.
3. Какими электрическими устройствами реализуют логические функции «да», «и», «или»? Каков их принцип действия?
Вариант 28.
1.Пневматические датчики и реле систем автоматики. Область их применения, устройство, принцип действия.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема термометрических датчиков (терморезисторов).
3. Методы измерения упругих деформаций деталей и узлов металлорежущего станка.
Вариант 29.
1.Виды контактов, применяемых в системах автоматического управления. Область их применения, устройство, принцип действия.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема ёмкостных датчиков.
3. Какими датчиками можно измерить перемещения рабочих органов станков, их принцип действия.
Вариант 30.
1.Классификация электрических датчиков систем автоматики. Их основные параметры.
2. Назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема индуктивных параметрических датчиков.
3. Перечислить бесконтактные методы измерений, применяемые в станках с ЧПУ. Привести примеры применения этих методов.
5. Пример ответов на вопросы контрольной работы.
Вопрос 1: контрольно-измерительные системы гибких производственных систем (ГПС).
Основная задача контрольно-измерительных систем (КИС) ГПС - обеспечение требуемого качества выпускаемых изделий, то есть контроль соответствия их заданным техническим характеристикам.
Структура КИС ГПС показана на рис. 1

Рисунок 1 – Структура контрольно – измерительных систем ГПС
В ГПС применяются следующие виды контроля:
- прямой и косвенный;
- пассивный и активный.
При осуществлении прямого контроля измеряется непосредственно контролируемый параметр. В качестве примера на рис.2 приведена схема прямого контроля путем измерения диаметра вала двухконтактным измерительным устройством (ИУ).

Рисунок 2 – Схема прямого контроля диаметра вала
При косвенном контроле контролируемый параметр определяется на основании измерения другого параметра, связанного с контролируемым функциональной зависимостью.
Например, на рис.3 приведена схема косвенного контроля диаметра вала. Ролик контактирует с валом и измерительное устройство (ИУ) определяет угол его поворота. Вычислительное устройство (ВУ) определяет диаметр вала на основании функциональной зависимости между числом оборотов вала, контролируемым датчиком оборотов (ДО), и соответствующим углом поворота ролика.

Рисунок 3 – Схема косвенного измерения диаметра вала
На основании пассивного контроля осуществляется проверка контролируемых параметров, в результате чего изделия подразделяются на 2 группы: годные и брак (исправимый и неисправимый). Причем иногда детали подразделяют на подгруппы, например, для селективной сборки.
На основании же результатов активного контроля осуществляется изменение параметров технологического процесса непосредственно в процессе изготовления изделия с целью повышения качества изготавливаемых изделий.
Классификация методов контроля в ГПС представлена на рис.4
 Рисунок 4 – Классификация методов контроля в ГПС
Рисунок 4 – Классификация методов контроля в ГПС
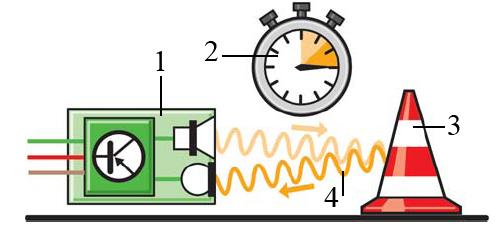
Вопрос 2: назначение, устройство, виды, принцип действия, область применения, достоинства и недостатки, схема ультразвуковых датчиков.
Ультразвуковые датчики могут применяться в качестве альтернативы оптическим датчикам, когда физические ограничения не позволяют использовать последние. К подобным случаям, например, относится распознавание объектов с неровными поверхностями, работа в тяжелых условиях или в сильно прозрачной среде, а также распознавание объектов с движущимися, сильно отражающими, жидкими поверхностями.
Ультразвуковые датчики, как правило, используются для проверки наличия сильно прозрачной пленки, расхода жидкости в гидроприводе, измерения уровней наполнения емкостей с жидкостями, расстояния до объекта. Основным преимуществом ультразвукового датчика является его абсолютно надежное подавление фона за счет использования времени пролета звука.
Основные характеристики ультразвукового датчика:
· Ультразвуковые датчики используют ультразвуковые волны как информационный носитель. Преобразователь посылает импульс звука и преобразует принятый отраженный сигнал в напряжение. Измерив время до прихода отраженного сигнала из фактора скорости звука интегрированный в сенсор контролер рассчитывает расстояние до объекта.
· Ультразвуковые датчики используют ультразвуковые волны как информационный носитель.
Структура ультразвукового датчика подобна структуре оптического датчика. Он состоит из трёх основных элементов: излучателя, приёмника и среды, через которую передаётся ультразвук.
Воздействовать на вход можно 2-мя способами: на излучатель или на канал передачи.

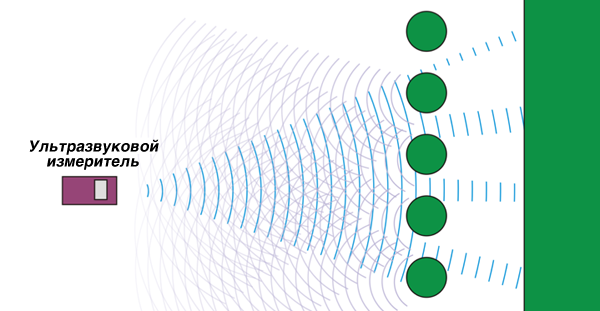
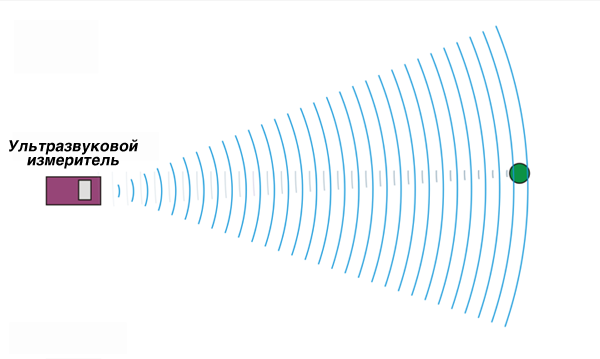
Ультразвуковые датчики представляют собой небольшие приёмопередающие модули. Принцип работы датчиков базируется на излучении ультразвукового сигнала, неслышного для человека. Этот сигнал распространяется в виде звуковых волн в окружающей среде с постоянной скоростью. Звуковые волны представляют собой происходящие концентрические волнообразные изменения плотности и давления частиц окружающего воздуха. Скорость распространения звука зависит от плотности среды, в которой он движется. При нормальном давлении (1 бар) и температуре 20 °C звук распространяется в воздухе со скоростью 343 м/с. Зависимость скорости распространения звука от температуры является основанием для использования системой управления сигнала от датчика наружной температуры в качестве корректирующей величины. Звуковые волны, попадая на предмет (например, на стену), отражаются от него в степени, зависящей от характеристик предмета. Это означает, что звуковые волны возвращаются к датчику и принимаются его микрофоном. При этом датчик измеряет время, прошедшее между отправкой сигнала и приёмом отражённых волн.
 Преобразование информации в электрический сигнал основано на эффекте магнитострикции
и пьезоэффекте - изменении геометрических размеров керамической или
кварцевой пластины при подаче на неё электрического поля и появлении
электрического поля на поверхности пластины при механических воздействиях на
неё. Колебания пластины с частотой прикладываемого электрического поля (300
кГц) вызывают появление звуковых волн такой же частоты. Эти волны
распространяются в воздухе со скоростью 330 м/сек. Они, подобно эху, отражаются
от предметов и возвращаются к ультразвуковому приёмнику. Воздействуя на
пластину, звуковые волны вызывают появление на ней электрического поля.
Преобразование информации в электрический сигнал основано на эффекте магнитострикции
и пьезоэффекте - изменении геометрических размеров керамической или
кварцевой пластины при подаче на неё электрического поля и появлении
электрического поля на поверхности пластины при механических воздействиях на
неё. Колебания пластины с частотой прикладываемого электрического поля (300
кГц) вызывают появление звуковых волн такой же частоты. Эти волны
распространяются в воздухе со скоростью 330 м/сек. Они, подобно эху, отражаются
от предметов и возвращаются к ультразвуковому приёмнику. Воздействуя на
пластину, звуковые волны вызывают появление на ней электрического поля.
Диапазон срабатывания ультразвукового датчика регулируется
изменением мощности излучения этих волн и промежутком времени, когда датчик
ждет отражение. Подстраивается расстояние срабатывания при помощи резистора.
Размер мишени для надежного срабатывания 30х30мм для рабочей зоны менее 1м и
100х100мм для рабочей зоны более 1м.
Бесконтактные способы измерения расстояний, используя волны в ультразвуковом диапазоне, широко применяются в нашей повседневной жизни. Мы сталкиваемся с ними, делая УЗИ в поликлинике, используя эхолот на рыбалке. Парктроник в автомобиле помогает нам избежать столкновения, сдавая задним ходом. И конечно же ультразвуковые датчики широко применяются в робототехнике, помогая нашему роботу лучше «осязать» мир. В живой природе принцип ультразвуковой локации используется, например, летучими мышами и дельфинами.
Длина волны находится в обратной зависимости от ее частоты, следовательно, ультразвуковые волны, по сравнению с обычным звуком имеют меньшую длину волны. Вследствие этого, ультразвуковые волны отражаются от различных препятствий гораздо лучше, чем обычные звуковые волны, что делает их весьма полезными на практике.
В ультразвуковых датчиках реализован принцип радара – фиксируются отражённые от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором, которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приёма ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими, ультразвуковые датчики на сегодняшний день являются наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультразвуковых дефектоскопах.
Пьезоэффект и магнитострикция
Кристаллы некоторых материалов (таких как кварц) способны совершать очень быстрые колебания, при прохождении через них электричества. Это, так называемый, обратный пьезоэффект. Во время вибрации, они толкают и тянут воздух вокруг себя, производя, тем самым, ультразвуковые волны. Устройства, которые производят ультразвуковые волны с помощью пьезоэлектричества, известны как пьезоэлектрические преобразователи. Пьезоэлектрические кристаллы могут также работать в обратном порядке: если ультразвуковые волны, распространяясь по воздуху, сталкиваются с пьезоэлектрическим кристаллом, слегка деформируют его поверхность, в результате чего в кристалле возникает электрическое поле. Итак, если подключить пьезоэлектрический кристалл к измерителю электрического напряжения, мы получим детектор ультразвука.
Ультразвуковые волны могут быть получены с использованием магнетизма вместо электричества. Так же, как пьезоэлектрические кристаллы производят ультразвуковые волны в ответ на электричество, существуют и другие кристаллы, которые излучают ультразвук в ответ на магнетизм. Это эффект магнитострикции. Такие кристаллы называются магнитострикционными кристаллами. Датчики, использующие их, называются магнитострикционными преобразователями.
В англоязычной литературе ультразвуковые датчики называются ultrasound sensor.
Схемы подключения ультразвукового датчика.
Выходной транзистор NРN-типа с открытым кол лектором.
Нагрузка подключается между выходом и общим, плюсовым, проводом. Выполняется
функция замыкающего контакта (в исходном состоянии нагрузка отключена).
Выпускаются две модификации: кабельное соединение и разъемное соединение.
лектором.
Нагрузка подключается между выходом и общим, плюсовым, проводом. Выполняется
функция замыкающего контакта (в исходном состоянии нагрузка отключена).
Выпускаются две модификации: кабельное соединение и разъемное соединение.

Выходной транзистор NРN-типа с открытым коллектором.
Нагрузка подключается между выходом и общим, плюсовым, проводом. Выполняется
функция размыкающего контакта (в исходном состоянии нагрузка подключена).
Выпускаются две модификации: кабельное соединение и разъемное соединение.
Применение ультразвуковых датчиков.
Благодаря использованию ультразвука выключатели этого типа способны распознавать объекты любой структуры - жидкости, порошкообразные материалы, прозрачные объекты из стекла и пластика. Ультразвуковые выключатели выполняют свои функции в условиях запыленности, задымленности, тумана. Они не чувствительны к постороннему свету и звуку. Наибольший эффект достигается при: определении уровня и высоты заполнения резервуаров; измерении расстояний; определении диаметра рулонов; контроле провисания, разрывов.
Измерение уровня заполнения

Контроль петли

Измерение диаметра, скорости

Контроль разрыва проводов и тросов

Подсчет предметов и контроль промежутков

Ультразвуковые дефектоскопы.
Принцип действия.
В основу функционирования дефектоскопа данного типа положено свойство проникновения ультразвуковых волн в твёрдые тела. Скорость распространения УЗ-волны в основном зависит от следующих параметров среды:
Датчик имеет источник и приёмник ультразвуковых волн. Если между источником (A) и приёмником (B) поместить исследуемый объект и измерять время прохождения волн от A к B, можно, зная расстояние AB, определить скорость распространения ультразвуковой волны через конкретный участок твёрдого тела. Это даёт возможность исследовать внутреннюю структуру твёрдого тела на наличие дефектов, колебаний плотности и модуля упругости.

Обнаружение скрытого дефекта с помощью ультразвукового дефектоскопа.
Другая реализация акустического дефектоскопа использует так называемый эхо-метод. Прибор содержит источник и регистратор УЗ-волн. Волны, отражаясь от внутренних дефектов, попадают на регистратор. Если дефектов нет, или же они в силу своей структуры или пространственной конфигурации не отражают УЗ-волны, регистратор ничего не обнаружит. В противном случае будет зафиксирован отражённый сигнал, по параметрам которого можно судить о физических и геометрических характеристиках дефекта.

Обнаружение скрытого дефекта с помощью ультразвукового дефектоскопа
(эхо-метод).
Описанные методы могут использоваться как по отдельности, так и в комплексе.
Достоинства:
Недостатки:
Ультразвуковые расходомеры
В устройствах данного типа используется свойство звуковых волн изменять скорость своего распространения в подвижной среде. Если установить источник (A) и приёмник (B) ультразвука со смещением, то о скорости потока можно судить по изменению скорости распространения звуковой волны вдоль отрезка AB.

Общая схема расположения ключевых элементов ультразвукового расходомера
Кроме того, для измерения локальной скорости потока может быть использован эффект Доплера, для этого источник и приёмник располагаются как указано на рисунке. Исходный сигнал, а также сигнал с приёмника отправляются на смеситель. Частота ультразвука, которую фиксирует приёмник, изменяется в зависимости от скорости потока, исходная частота остаётся неизменной. Частота сигнала на выходе из смесителя является разностью частот исходного и принятого сигнала - по этой величине можно однозначно судить о локальной скорости вещества в потоке.

Общая схема расположения ключевых элементов расходомера на эффекте Доплера
Ультразвуковые датчики перемещения
Ультразвуковой дальномер
Используя пьезоэлектрические или магнитострикционные преобразователи, мы можем создать устройство, измеряющее расстояние до объектов — ультразвуковой дальномер, который работает следующим образом.
В момент измерения мы создаем электрическое колебание при помощи генератора, которое преобразуясь (например, при помощи пьезокристалла) в ультразвуковую волну, излучается в окружающее пространство. Эта волна отражается от препятствия и возвращается как эхо в приемник (также можно использовать пьезокристалл). Измеряя время между посылкой и приемом нашего отраженного сигнала, и зная скорость звуковой волны, распространяемой в данной среде, мы можем вычислить расстояние до препятствия.

Ограничения
Паразитный эхо-сигнал
Отражение от маленького объекта приводит к слабому сигналу
Зная ограничения, связанные с физической природой ультразвука можно решить подходит этот тип дальномера для вашей задачи или же нет.

Ультразвуковой датчик перемещения.
Вопрос 3: датчики для измерения скорости выходного звена гидропривода.
Регулирование скорости выходного звена гидропривода выполняют путём изменения расхода жидкости. Следовательно, контроль скорости в гидроприводе осуществляют путём контроля расхода жидкости. Расход контролируют поплавковыми, турбинными, вихревыми, ультразвуковыми расходомерами.
Поплавковые расходомеры.
К поплавковым расходомерам постоянного перепада давления в первую очередь относятся ротаметры.

В простейшем виде ротаметр (схема а) представляет собой вертикальную конусную стеклянную трубку 1, расширяющуюся к верху, внутри которой находится свободно перемещающийся вверх и вниз поплавок 2. На верхнем ободке поплавка имеются бороздки, которые обеспечивают вращение поплавка в потоке жидкости и его самоцентрирование. Жидкость движется вверх по трубке, вынуждая поплавок подняться на определенную высоту и образовать такой кольцевой зазор между ним и стенками трубки, при котором силы, действующие на поплавок, уравновешиваются. Каждому значению расхода соответствует определенное положение поплавка.
Для замеров расходов жидкости, находящейся под более высоким давлением, применяют расходомеры в металлическом корпусе (схема б). Корпус 5 представляет собой прямоточную трубу с фланцами на концах, в которых крепится мерительный конус 4. Перемещающийся под воздействием измеряемого потока подпружиненный поплавок 1, снабжен кольцевым постоянным магнитом 2, взаимодействующим с наружным кольцевым магнитом 3. Положение поплавка 1, соответствующее определенному расходу жидкости, отслеживается по положению магнита 3, перемещающегося вдоль измерительной шкалы.
Недостатком таких расходомеров является отсутствие возможности записи показаний.
На схеме в показан поплавковый расходомер, индикация результатов измерений в котором осуществляется непосредственно на шкале устройства. С помощью контактных переключателей или токового выхода результат измерения может быть представлен для дальнейшего использования.
Турбинные расходомеры.
Принцип действия турбинных расходомеров основан на измерении числа оборотов крыльчатки (турбинки), которая вращается со скоростью, пропорциональной расходу жидкости через прибор. По конструктивному исполнению их подразделяют на две основные группы: крыльчатые (с тангенциальным подводом потока), в которых ось вращения крыльчатки перпендикулярна направлению движения жидкости, и турбинные (с аксиальным подводом потока), у которых ось вращения параллельна направлению движения потока.

По сути турбинные расходомеры представляют собой генераторы электрических сигналов, частота которых пропорциональна частоте вращения турбины и в итоге - расходу протекающей среды. В корпусе 1 расходомера в подшипниках 4 установлено рабочее колесо – турбинка 2, ось вращения которой параллельна направлению потока жидкости. В корпусе 1 размещен первичный преобразователь 3, генерирующий электрический сигнал на своём выходе, когда в зоне его действия оказывается лопатка рабочего колеса 2. полученные сигналы передаются во вторичный прибор, где преобразовываются, приводятся к стандартизованному виду и при необходимости визуализируются в оцифрованном виде.
В настоящее время именно турбинные расходомеры обеспечивают высокую точность измерений, недоступную другим приборам. Но изделия такого класса достаточно дороги и имеют серьёзные недостатки: большой перепад давления и чувствительность к абразивному воздействию.
Вихревые расходомеры.
В основе принципа действия вихревых расходомеров лежит широко известное природное явление – образование вихрей за препятствием, стоящим на пути потока. При скоростях среды выше определенного предела вихри образуют регулярную дорожку, называемую «дорожкой Кармана». Частота образования вихрей при этом прямо пропорциональна скорости потока.
В рабочем канале корпуса 1 расходомера установлен вихреобразователь 2, обтекая который поток разделяется и образует вихри, распространяющиеся попеременно сзади каждой стенки вихреобразователя. Эти завихрения являются причиной появления областей с колебаниями давления, которые фиксируются чувствительным элементом 4 датчика 3 и преобразуются в электрический частотный сигнал.

Основные достоинства вихревых расходомеров:
• отсутствие подвижных деталей, что обусловливает высокую надёжность и стабильность метрологических характеристик;
• линейный выходной сигнал;
• широкий динамический диапазон измерений;
• малую потерю давления.
Вихревые расходомеры с хорошей точностью измеряют скорость потока независимо от типа среды.
Недостатком является необходимость установки прибора на длинных (не менее восьми диаметров) прямолинейных участках трубопровода. Наличие таких участков трубопровода до и после расходомера гарантирует исключение посторонних возмущений потока.
Ультразвуковые расходомеры.
Расход жидкости, протекающей через расходомер, вычисляется путем измерения либо времени распространения ультразвука в потоке, либо изменения частоты ультразвуковых колебаний (эффект Доплера).
Прибор состоит из двух датчиков и блока электроники. Датчики 1 врезают в трубопровод, либо крепят на внешней поверхности трубы 2, и подключают к блоку электроники с дисплеем.


Врезной ультразвуковой расходомер.
Датчики (ультразвуковые преобразователи), одновременно являясь и излучателями и приёмниками, последовательно отправляют и принимают ультразву
ковые сигналы. Сравнивая время прохождения сигналов по и против течения потока, прибор автоматически вычисляет скорость течения жидкости.
На основании проведенного замера и ранее занесенных данных о диаметре трубопровода, вторичный преобразователь производит вычисление объемного расхода, которые в виде стандартизованного электрического сигнала подаются в систему управления, либо оцифровываются и выводятся на индикатор. Измерение расхода может производиться как при прямом, так и при обратном направлении потока.
Для измерения расхода жидкостей в напорных трубопроводах наиболее часто применяют врезные ультразвуковые расходомеры, поскольку их принято считать более точными по сравнению с расходомерами, которые устанавливаются на внешней поверхности трубопровода (с накладными датчиками). Однако в настоящее время расходомеры с накладными ультразвуковыми преобразователями находят все более широкое применение. Это обусловлено тем, что расходомеры с накладными датчиками не требуют остановки технологических процессов для врезки в трубопровод и перекрытия вентилей, что особо ценно при экспресс - измерениях.
Преимуществами расходомеров с накладными датчиками является и то, что при их установке не возникает падение давления в трубопроводе, нет влияния прибора на поток. Эти приборы отличает простота установки, переноса и замены датчиков.
Реле расхода.
Реле расхода или индикаторы применяют в тех случаях, когда необходимо контролировать наличие расхода, имеющего определенное значение, в какой – либо магистрали гидросистемы и формировать при этом соответствующий информационный или управляющий сигнал. Например, для контроля утечек в основном насосе системы, критическое значение которых свидетельствует о достижении насосом предельного состояния, когда его дальнейшая эксплуатация становится не только неэффективной, но и опасной, может использоваться реле расхода, изображенное на рисунке.
В корпусе 1 расположена подпружиненная подвижная втулка 4, радиальные отверстия 2 которой образуют с цилиндрической проточкой 3 в корпусе 1 дросселирующие щели. При протекании жидкости через реле положение втулки 4 относительно корпуса 1, а следовательно, и площади проходных сечений дросселирующих щелей, будут определяться равновесием усилий, действующих на втулку со стороны рабочей жидкости и пружины 5. Увеличение расхода жидкости через реле приводит к смещению втулки 2 в сторону увеличения площадей дросселирующих щелей, а при достижении расходом некоторого порогового значения – к срабатыванию датчика 6.

Реле расхода
На рисунке показано реле расхода, система измерения которого состоит из подпружиненного поворотного рычага 4 и связанного с ним диска5, расположенного в конической части 6 рабочего канала.

При течении жидкости система измерения занимает позицию, в которой сила потока, действующая на диск 5, уравновешивается силой пружины. Таким образом, положение системы измерения соответствует текущему значению объёмного расхода. установленный на рычаге 4 постоянный магнит 3, через стенку корпуса взаимодействует с постоянным магнитом 2, связанным с флажком – индикатором. Когда расход жидкости через реле достигает контролируемого значения, магнит 2 занимает положение, вызывающее срабатывание герконового выключателя 1.
Рабочие листы
к вашим урокам
Скачать


6 651 357 материалов в базе
Настоящий материал опубликован пользователем Мартьянова Валерия Юрьевна. Инфоурок является информационным посредником и предоставляет пользователям возможность размещать на сайте методические материалы. Всю ответственность за опубликованные материалы, содержащиеся в них сведения, а также за соблюдение авторских прав несут пользователи, загрузившие материал на сайт
Если Вы считаете, что материал нарушает авторские права либо по каким-то другим причинам должен быть удален с сайта, Вы можете оставить жалобу на материал.
Удалить материалВаша скидка на курсы
40%
Курс профессиональной переподготовки
500/1000 ч.

Курс профессиональной переподготовки
300/600 ч.

Курс профессиональной переподготовки
600 ч.

Курс повышения квалификации
72/180 ч.

Мини-курс
6 ч.


















Оставьте свой комментарий
Авторизуйтесь, чтобы задавать вопросы.