

















- 26.03.2014
- 1254
- 0
Составитель: Шкилёва И.И.
Учитель информатики и ИКТ
Lego –конструирование.
Lego Mindstorms.
Часть 1.
Содержание
1.
Введение
3
2.
Основные детали и их назначение.
5
3.
Микрокомпьютер NXT.
5
4.
Датчик касания
9
5.
Датчик звука
11
6.
Датчик освещенности
12
7.
Датчик расстояния
14
8.
Интерактивные сервомоторы
16
9.
Лампы
18
10.
Использование Bluetooth.
19
11.
Способы крепления:
20
Механический манипулятор
20
Механическая передача
21
Передаточное отношение
21
Волчок
24
Редуктор
28
Одномерные тележки
29
Полноприводные тележки
31
12.
Список литературы
33
1.Введение.
В современном сознании, сформированном не одним поколением, робот представляет собой некоторый человекоподобный механизм, выполняющий полезную работу людям (или, наоборот, бунтующий и чрезвычайно опасный).Однако промышленные роботы редко похожи на людей или животных.
Само слово «робот» является неодушевленным существительным, мы говорим: «строим роботы». Сравните: «строит мосты», и «разводим слонов». Но ребенку свойственно анимировать попадающую ему в руки игрушку, т.е. воображать ее подобной живому существу, одушевленной. А разве взрослым не хочется того же?
Роботы очаровательны. Идея неживой материи, которая самостоятельно выполняет сложные задания, просто поразительна! С тех пор как роботы стали такими технологически сложными и современными, можно было бы подумать, что для их конструирования и программирования необходимы большие знания и навыки. Однако серия кибернетических конструкторов LEGO Mindstorms делает робототехнику легкой и увлекательной как для взрослых, так и для детей.
Серия конструкторов Mindstorms началась еще в 1998 г. С Робототехнической Изобретательной Системы (RoboticsInventionSystemRIS),созданной на базе микроконтроллера RCX. Устройства вроде моторов, датчиков и микрокомпьютеров могли совмещаться с другими обычными деталями LEGO для создания действующих роботов. RIS также была оснащена доступным языком программирования, который позволял самостоятельно запрограммировать действии самодельных роботов на базе RCX.
Начиная с 2006г., с новым набором LEGO Mindstorms NXT пользователи получили многочисленные усовершенствования по сравнению с RIS, делающие создание роботов еще проще и увлекательнее.
Однако конструктор NXT выходил за пределы простых усовершенствований «железа» и программного обеспечения. Новый набор открывает робототехнику для всех возрастов. Кроме того, он проще остальных и не вызывает чувства раздражения.
2.Основные детали и их назначение.
USB порт.
Присоедините кабель USBк разъему USB и загрузите программы со своего компьютера в NXT выгрузите данные из робота в компьютер). Для связи между компьютером и NXT можно использовать также беспроводное соединение Bluetooth.
3.Микрокомпьютер NXT.
«Мозгом» робота LEGOMindstormsEducation является LEGONXT, делающий робота программируемым, интеллектуальным, способным принимать решения.

Гнездо подключения питания.
В случаях, если вы используете аккумулятор и его нужно подзарядить или у вас не установлены батарейки типа АА, можно подключить сетевой адаптер непосредственно к этому гнезду NXT( сетевые адаптеры необходимо приобретать отдельно).
Пиктограмма USB
Пиктограмма Bluetooth.
Значок Bluetooth появляется на дисплее тогда, когда установлено любое беспроводное соединение Bluetooth. Если этого значка нет, значит, соединениеBluetooth отключено.
![]() Функция Bluetooth включена, однако NXTневидим для других устройств Bluetooth.
Функция Bluetooth включена, однако NXTневидим для других устройств Bluetooth.
![]() Функция Bluetooth включена, и видим NXT другим устройствам Bluetooth.
Функция Bluetooth включена, и видим NXT другим устройствам Bluetooth.
![]() Функция Bluetooth включена, и NXT установил связь с устройством Bluetooth.
Функция Bluetooth включена, и NXT установил связь с устройством Bluetooth.
Выходные порты.
На NXT имеется три выходных порта для подключения электромоторов или ламп, помеченных буквами А,В,С.

Кнопки управления NXT.
Оранжевая Включить/Ввести. Светло- серые стрелки: Навигация, Вправо, Влево.
Темно- серая: Очистить/ Вернуться.
Выключение NXT.
Нажмите оранжевую кнопку, чтобы выключить NXT,а чтобы вернуться к главному меню NXT, нажмите темно-серую кнопку.
Нажимайте темно- серую кнопку до тех пор, пока не появиться следующая картинка:
Входные порты.
NXT имеет четыре входных порта для присоединения датчиков. Датчики должны подключаться к портам 1,2,3 или4.
Громкоговоритель.
Если в программу заложены звуки, их можно услышать через громкоговоритель.
Уровень заряда аккумулятора.
Изображение батарейки показывает уровень мощности NXT . Если заряд аккумулятора становиться ниже 10%,значок начинает мигать.
Индикаторы работы NXT
Когда NXT включен, этот значок вращается. Остановка вращения означает, что блок NXT «завис» и его необходимо перезагрузить.
Дополнительные функции экрана NXT.
NXT имеет много других возможностей.
Технические характеристики.
32-разрядный микропроцессор ARM7
256КБ FLASH,64 КБ RAM
8-разрядный микропроцессор
4КБ FLASH, RAM 512 байт
Беспроводное соединение Bluetooth
Совместимость с BluetoothClassIIV2.
USB 2.0 порт
Четыре входных порта, цифровая платформа для 6-жильного кабеля
3 выходных порта, цифровая платформа для 6- жильного кабеля
Графический ЖК- дисплей 60 х 100 пикселов
Громкоговоритель -качество звука 8 КГц
Источник питания, литиевый аккумулятор или 6 батареек типа АА
Вилка сетевого адаптера
США≈120 В, 60Гц
Великобритания, ЕС, Австралия ≈ 230 В, 50 Гц.

Переименование NXT.
Можно изменить имя NXT, открыв окно NXT в программе Lego®Mindstorms® EducationNXT. Это открывается нажатием кнопки NXTwindow на пульте управления. Имя NXT не должно содержать более восьми знаков.
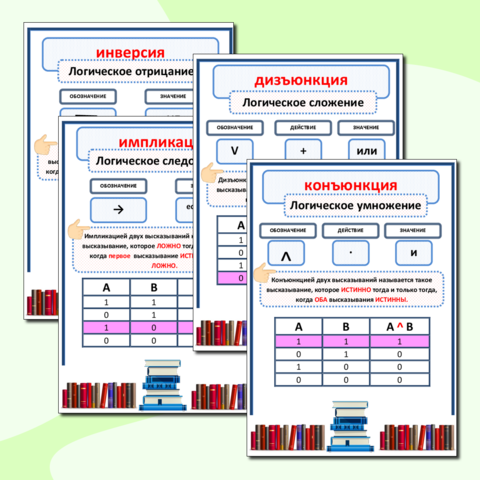
Датчик расстояния
Позволяет роботу измерять расстояние до окружающих предметов и реагировать на движение
Датчик освещенности
Позволяет роботу реагировать на изменение освещенности и цвета
Датчик звука
Позволяет роботу реагировать на звуки различной громкости
Датчики касания
Дают роботу возможность «ощутить» окружающие его препятствия
Микрокомпьютер NXT.
«Мозгом» робота LegoMindstorms® Education микрокомпьютер Lego®NXT, снабженный входными портами для датчиков и выходными портами для исполнительных устройств.

4.Датчик касания.

Датчик касания NXT (TouchSensor), или контактный выключатель, реагирует на нажатие и отпускание, а программно организован еще и режим касания.
Этот датчик позволяет произвести проверку его состояния на определенном этапе исполнения программы. Он посылает зарегистрированный сигнал в виде логической команды ("истина" или "ложь") через шину данных. Если датчик сработал, блок отправит команду "истина"; если датчик не сработал, блок отправит команду "ложь".
Возможные применения:
Вы можете добавить вробот датчик касания запрограммировать его так, чтобы его действия зависели от того, нажат кнопка датчика или отпущена.

Нажмите и удерживайте кнопку датчика касания – на экране должен появиться значок 1.
Подключите датчик касания к порту1. Выберите на экране NXT меню View (Вид). Выберите значок Touch (Касание). Выберите Порт 1.
Чтобы увидеть текущее состояние датчика касания ,откройте меню View. Значок[0] означает, что кнопка не нажата, [1] – нажата.
А теперь отпустите кнопку датчика. На экране появиться значок 0.
5.Датчик звука.
Датчик звука предназначен для определения уровня громкости звука: тихий он или громкий. Датчик звука определяет как нормативные уровень громкости (ДБ), так и скорректированный уровень громкости (ДБА).
ДБА - это те звуки, которые могут слышать уши человека.
ДБ – все реальные звуки, включая те, которые не улавливает человеческое ухо, слишком высокие или слишком низкие.
Датчик звука может измерять уровень звукового давления вплоть до 90 ДБ – что примерно соответствует шуму, издаваемого газонокосилкой. Показания датчика звука отображаются на экране NXT в процентах (%) от максимального уровня, который датчик может измерить. Для сравнения: 4-5 % соответствует уровню шума в тихой жилой комнате; 5-10 % обычная речь, 10-30% - нормальный разговор вблизи датчика или музыка, воспроизводимая на нормальном уровне громкости; 30 -100% - громкие крики или музыка. Подразумевается, что датчик расположен на расстоянии 1м от источника звука.
Возможные применения.
Можно так запрограммировать робота, чтобы его действия зависели от показаний датчика звука.
6.Датчик освещенности.
Датчик освещенности дает роботу возможность различать светлое и тёмное, измерять интенсивность света в помещении и яркость разноцветных поверхностей.
Это то, что видит глаз человека.

А это – то, что различает датчик освещенности робота.
Возможные применения:
Можно так запрограммировать робота, чтобы его действия зависели от показаний датчика освещенности.
Подносите датчик к предметам различных цветов и сравните показания. Чтобы оценить показания датчика, воспользуйтесь цветовой таблицей.
Выберите значок Reflectedlight (Отраженный свет). Выберите порт, к которому подключен датчик освещенности.
Чтобы различить цвета, используйте отраженный свет.
Присоедините датчик освещенности. Откройте меню View.
Проверьте разными способами датчик освещенности с помощью меню View. Для получения отраженного света в датчике включается маленький прожектор.
Измерение освещенности:
При измерении окружающей освещенности прожектор датчика освещенности не нужен ион не включается.
Подключите датчик освещенности NXT. Откройте на экране меню View (Вид).
Выберите значок Ambientlight (Окружающая освещенность). Выберите порт, к которому подключен датчик освещенности.
Проверьте способность датчика определять освещенность в разных частях помещения. Поднесите датчик сначала к окну, затем подержите его под столом. Заметьте разницу в показаниях. Чем больше цифра на дисплее, тем выше освещенность. Соответственно, чем меньше цифра, тем ниже уровень освещенности.
7.Датчик расстояния.

Ультразвуковой датчик расстояния – это второй датчик, делающий робота «зрячим». Он позволяет роботу «видеть» и различать объекты. Вы можете создать робота, способного избегать препятствий, встречающихся на его пути, измерять расстояния, а также реагировать на движение.
Датчик работает по тому же принципу, что и локатор летучих мышей: он измеряет расстояние путем подсчета времени, необходимого звуковой волне для того, чтобы достичь объекта и, отразившись от него, вернуться обратно – в точности, как эхо.
Датчик способен измерять расстояние, как в сантиметрах, так и в дюймах – от 0 до 2,5 метров, с точностью +/-3 см.
Большие объекты с твердой поверхностью дают лучшее отражение. Объекты, изготовленные из мягкой ткани, или с криволинейной поверхностью (например, мяч), или очень тонкие или мелкие предметы, ультразвуковой датчик расстояния распознаёт с трудом.
Возможные применения:
Проверьте способность датчика измерять, определять расстояния используя меню View. Подключить датчик к NXT. Откройте меню View на экране View.
Вы можете запрограммировать робота так, чтобы его действия зависели от показаний датчика расстояния.
Попробуйте измерить расстояние до объекта. Перемешайте предмет или просто руку вблизи датчика и наблюдайте, как меняются показания.
Выберите значок Object. Выберите порт, к которому подключен датчик расстояния.
8.Интерактивные сервомоторы.

Три интерактивных сервомотора обеспечивают роботу возможность перемещаться.
Встроенный датчик оборотов. Каждый мотор оснащен встроенным датчиком оборотов, что позволяет очень точно управлять движениями робота. Датчик производит измерения в градусах или в количестве полных оборотов (точность измерения +/- один градус). Один полный оборот соответствует 360 градусам, следовательно, если вы зададите мотору поворот на 180, его вал сделает пол оборота.
Возможные применения:
Встроенные датчики оборотов, наряду с возможностью управления моторов позволяют задавать различную скорость вращения и обеспечивают высокую точность движений робота.
Проверьте способность датчика оборотов измерять расстояния, используя меню View.
Подключите мотор к NXT. Откройте на экране NXT меню View.

Выберите значок Motorrotation (Обороты мотора)
Выберите порт, к которому подключен мотор, а теперь закрепите на валу мотора колесо и определите количество оборотов, прокатив его по полу.
Ступица с осевым отверстием для установки колеса

Встроенная зубчатая передача
Корпус мотора
Тахометр для встроенного датчика оборотов
9.Лампы.
Лампы можно включать и выключать, создавая сверкающие модели. Их можно также применять для активации датчика освещенности, или для индикации включения мотора, или для контроля состояния датчиков, или для «оживления» «глаз» робота, или для других подобных целей.
Подключайте лампы к разъемам А,В или С через кабели- переходники. В наборе три переходника и три лампы.
Обратите внимание: показания датчика изменяются
Зажгите лампу вблизи датчика освещенности
Используйте лампы для активации датчика освещенности. Выберите AmbientLight(Окружающее освещение).
Применение лампы: для активации датчика освещенности выберите AmbientLight(Освещенность)

10.Использование Bluetooth.

Bluetooth – это технология беспроводной связи. При помощи функции Bluetooth можно установить беспроводное соединение между микрокомпьютером NXT и другими устройствами, обладающими устройствами Bluetooth, например, с другими NXT, с мобильными телефонами или с компьютерами.
Установив соединение с Bluetooth, вы можете:
Загружать программы с компьютера без кабеля USB;
Отправлять программы с других устройств (не с компьютера), в том числе и с вашего NXT;
Отправлять программы как на отдельные NXT, так и на их группы. Группы может состоять не более чем из трех NXT.
Если ваш мобильный телефон имеет функцию Bluetooth, то с его помощью можно управлять роботом. Более того, вы даже можете применять телефон в качестве совершенствованного датчика, например, используя его встроенную камеру.
11.Способы крепления.
Механический манипулятор:
Эту игрушку можно назвать по - разному. Иногда на ее конце располагается голова клоуна и внезапно высовывается из потаенного ящичка на большое расстояние. Иногда она похожа на длинную свернутую трубочку «тещин язык», которая выпрямляется с противным свистом. Иногда на конце располагается маленькая боксерская перчатка. Добавим игрушке немного функциональности и назовем ее механическим манипулятором или просто «хваталкой». И постараемся сделать ее как можно длиннее.
Опишем требования к конструкции:
Хватательный механизм должен иметь минимальную длину в сложенном состоянии и максимальную в разложенном;
У механизма должно быть две ручки, как у щипцов, и многоколенчатое соединение, ведущее к хватательной части;
Изобретатель должен суметь взять с помощью «хваталки» некоторый предмет и перенести его с места на место.
Начальный этап создания конструкции прост: шарнирные соединения с помощью шрифтов в трех точках на каждой из используемых балок: посередине и по краям. Здесь обратим внимание на типы используемых шрифтов. Часть из них гладкие, а другие имеют небольшие ребра для фиксации в отверстиях.
Конечно, в нашей конструкции лучше использовать гладкие, пусть даже трехмодульные, поскольку шрифты с фиксатором затрудняют вращение вокруг них. Но и не блокируют совсем, поэтому при отсутствии достаточного количества гладких фиксирующие тоже подойдут.
На втором этапе необходимо соорудить хватательную часть, которой будут удерживать предметы. А третий этап –
научиться пользоваться манипулятором только одной рукой. Оставляем это для фантазии читателя.
Механическая передача.
Важнейшей частью почти каждого робота является механическая передача. В разных конструкторах предлагается несколько ее видов: зубчатая, ременная, цепная и т.д. Передача бывает необходима, для того чтобы передать крутящий момент вала двигателя на колеса или другие движущиеся части робота. Довольно часто требуется передать вращение на некоторое расстояние или изменить его направление, например на 180 или 90 градусов.
Передаточное отношение.
При всякой передаче существенную роль играет особая величина – передаточное отношение( а также передаточное число), которое надо научиться рассчитывать. Для этого необходимо знать число зубчиков на шестеренках при зубчатой или цепной передаче и диаметр шкивов при ременной передаче. На крупных шестеренках число зубцов написано, например, «Z40» на самой большой. На мелких нетрудно сосчитать самим.
Как точно знать, во сколько раз увеличилась тяговая сила? За это отвечает специальная величина, именуемая «передаточное отношение». Для нашего конструктора мы определим ее следующим образом:
 ,
,
ГдеI – передаточное отношение, z2 –количество зубцов на ведомой шестерне, z1 –количество зубцов на ведущей шестерне.
Таким образом, при i<1 тяговая сила уменьшается, а 
Передача с понижением скорости: слева i=3:1, справа i=5:3 [3].
угловая скорость возрастает; при i>1 сила увеличивается, а скорость падает.
Если при передаче участвует несколько подряд установленных зубчатых колес, то при расчете передаточного отношения учитывается только первое и последнее из них, а остальные называются «паразитными». Паразитные шестерни исполняют полезную функцию только при необходимости передачи вращения на некоторое расстояние. В остальных случаях они лишь увеличивают потери на трение.
Две промежуточные шестерни – паразитные [3].
Двухступенчатая передача [3].
Однако зубчатую передачу можно построить таким образом, чтобы каждая шестерня выполняла полезную функцию и служила либо для увеличения, либо для уменьшения передаточного отношения.
И наконец определим понятие «передаточное число». Его используют, когда необходимо вычислить коэффициент изменения скорости или силы вне зависимости от направления возрастания.

Передаточное число 15

Механическая передача с передаточным числом 135
Волчок.
Каждый из нас с детства знаком с замечательной игрушкой – юлок. Несколько движений – и юла около минуты держим вертикальное положение. С волчком еще проще. Стержень, закрепленный на нем диск, быстрое круговое движение пальцами, и с волчком происходит то же самое, что и с юлой, только без какого –либо механизма. Но так или иначе через некоторое время волчок падает, исчерпав заложенный в него ресурс. Хорошая тренировка для пальцев. Однако скорость вращения запущенного рукой волчка невысока. Требования к волчку и механизму:
Волчок должен иметь ось вращения и достаточно тяжелый диск маховик, который сохранит инерцию вращения;
Центр тяжести волчка должен быть расположен достаточно низко, но и не слишком, чтобы края не цеплялись за поверхность стола;
На оси вращения волчка необходимо установить шестерню для начального сцепления с механизмом;
На механизме должны присутствовать две детали: для удержания одной рукой и придания вращения другой;
В момент раскручивания волчок должен иметь плотное соприкосновение с механизмом;
Сразу после раскручивания волчок должен свободно отделяться от механизма.
Волчок.

Маховик волчка может быть любым колесом, не обязательно зубчатым. Отметим, что волчок с более тяжелым маховиком вращается дольше.
Простейший запускающий механизм 1:3
При запуске необходимо быстро повернуть ведущую ось на механизме и сразу поднять его, чтобы волчок вращался свободно.Попробуйте построить механизм самостоятельно 1:5.
Переходим к двухступенчатой передаче. Следует заменить первую ось на более короткую, а вместо втулки поставить малую 8 – зубную шестеренку.

Двухступенчатая передача 1:9
Третья ступень передачи может быть построена с помощью 40- зубной шестерни. Передаточное отношение в этом случае будет 1:45. Соответственно и усилие для раскручивания потребуется в 45 раз большее. Поэтому на ведущую ось следует поставить рычаг или дополнительное колесико, которое облегчит задачу запускающему.
При добавлении третьей ступени может потребоваться волчок

Когда при запуске слышен характерный треск зубчиков шестеренок, который возникает на холостом прокручивании, стоит побеспокоится. если ваши роботы будут трещать, зубчатые колеса быстро выйдут из строя. Это происходит из- за непрочного крепления осей в валках: они с легкостью отклоняются на несколько миллиметров. От этого можно защититься, добавив дополнительные балки и удлинив тем самым отверстие, в котором расположена ось.
Защита от холостого прокручивания шестеренок

Редуктор.
Этот механизм используется совместно с двигателями для преобразования и передачи крутящегося момента. Чаще всего служит для понижения частоты вращения и повышения крутящего момента вместе с тяговой силой. Существует множество их разновидностей. То, что мы сделаем сегодня – это, с одной стороны, полезный механизм, с другой – головоломка для товарищей.
Осевой редуктор с передаточным отношением
Суть проста: внутри «черного» ящика (картера) строиться зубчатая передача таким образом, чтобы ведомая ось находилась на одной прямой с ведущей. Поскольку вращаться они не могут с разной скоростью и даже в разные стороны, построить такую же головоломку представляется простой, но довольно интересной задачей.
Одномоторные тележки.
![]()


Обе оси закрепляются на отдельную балку

Колеса крепятся так, чтобы не было трения с балками

Тележка поедет под управлением через второй мотор
Управлять такой тележкой нетрудно, но к сожалению, она связана с нами кабелем. Тем не менее, стоит проехаться по столу, преодолевая препятствия и убедиться, что это возможно. Однако гораздо эффективнее по пересеченной местности движется тележка с полным приводом.
Полноприводная тележка.

Наиболее эффективное расположение шестеренок для тележки

Три из пяти шестеренок паразитные, но польза от них есть

При таком расположении колес возникает трение с соседними шестеренкам
12.Список литературы:
Lego®Mindstorms®Education
Жимарши Ф. Устройства управления робота./Ф.Жимарши. пер.с.фр. М.А.Комаров. – М., НТ-Пресс,2007.- 288с.:ил.
Филлипов С.А. «Робототехника для детей и родителей»./С.А. Филлипов. - С-П.: «Наука»,2010
Рабочие листы
к вашим урокам
Скачать
Данное методическое пособие позволяет познакомить учеников с основами конструирования основных элементов общеобразовательного конструктора lego Mindstorms NGT-G.
6 664 849 материалов в базе
Настоящий материал опубликован пользователем Чепрокова Ирина Ивановна. Инфоурок является информационным посредником и предоставляет пользователям возможность размещать на сайте методические материалы. Всю ответственность за опубликованные материалы, содержащиеся в них сведения, а также за соблюдение авторских прав несут пользователи, загрузившие материал на сайт
Если Вы считаете, что материал нарушает авторские права либо по каким-то другим причинам должен быть удален с сайта, Вы можете оставить жалобу на материал.
Удалить материал
Ваша скидка на курсы
40%
Курс профессиональной переподготовки
500/1000 ч.

Курс профессиональной переподготовки
300/600 ч.

Курс профессиональной переподготовки
300/600 ч.

Курс повышения квалификации
36 ч. — 180 ч.

Мини-курс
4 ч.

Мини-курс
6 ч.

Мини-курс
6 ч.
Оставьте свой комментарий
Авторизуйтесь, чтобы задавать вопросы.